제품 소개
산업용 로봇팔(5축 서보·팔레타이징·핸들링)은 전축 서보 모터로 구동되는 5축 매니퓰레이터로, 제품을 정밀하게 집어 옮기고 정렬·반전하는 자동화 주변 장비입니다.
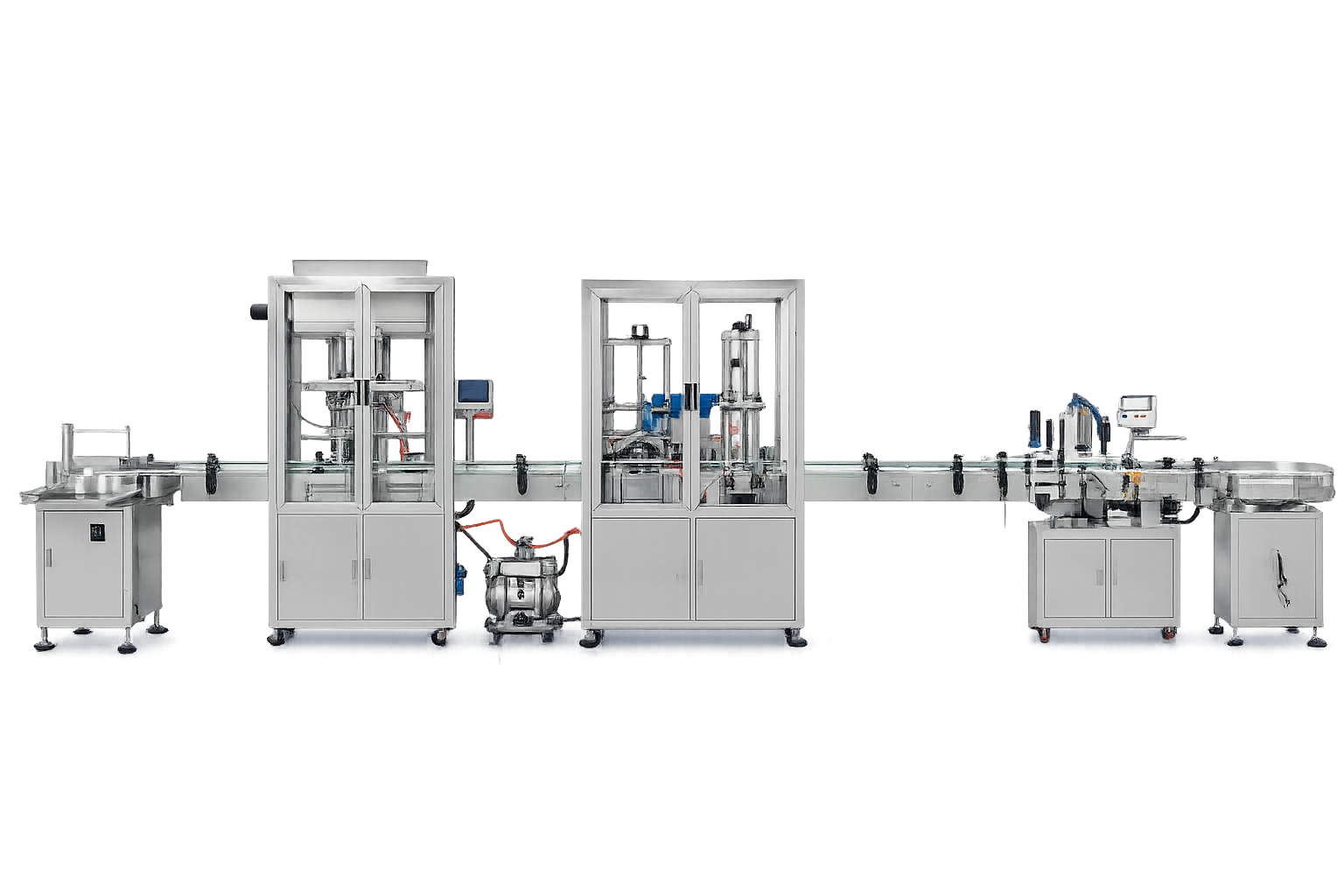
사출 성형·조립·포장 등 다양한 현장에서, 픽업·로딩·언로딩·워크피스 이동/반전·순서 변환을 자동으로 처리하므로, 반복 핸들링·팔레타이징 작업의 자동화에 적합합니다.
포장 자동화 시스템, 수직포장기(VFFS), 수평포장기(HFFS), 날인·코딩 시스템, 반자동 장비를 확인하실 수 있습니다.
산업용 로봇팔(5축 서보·팔레타이징·핸들링)은 전축 서보 모터로 구동되는 5축 매니퓰레이터로, 제품을 정밀하게 집어 옮기고 정렬·반전하는 자동화 주변 장비입니다. 사출 성형·조립·포장 등 다양한 현장에서, 픽업·로딩

산업용 로봇팔(5축 서보·팔레타이징·핸들링)은 전축 서보 모터로 구동되는 5축 매니퓰레이터로, 제품을 정밀하게 집어 옮기고 정렬·반전하는 자동화 주변 장비입니다.
사출 성형·조립·포장 등 다양한 현장에서, 픽업·로딩·언로딩·워크피스 이동/반전·순서 변환을 자동으로 처리하므로, 반복 핸들링·팔레타이징 작업의 자동화에 적합합니다.
워크피스 위치 인식 → 5축 서보 이동·파지(그립) → 이송·정렬/반전 → 지정 위치 플레이스(적재/배출)
| 구분 | 산업용 5축 풀서보 매니퓰레이터 (핸들링/팔레타이징/사출물 취출) |
|---|---|
| 구동 | 전축 서보 모터 (5축) |
| 기능 | 멀티포인트 정차·정렬, 정밀 위치 결정, 파지 힘 제어 |
전원 / 가반하중(payload) / 축별 스트로크·스팬 / 반복정밀도 / 도달거리 / 제어기: 확인 필요 (자료 미표기)
※ 본 제품은 제조사 수치 사양표 자료가 확보되지 않아, 전원·가반하중·스트로크·정밀도 등은 적용 조건에 맞춰 확인 후 안내드립니다.



해당 설비와 함께 구성하면 공정 흐름을 더 안정적으로 만들 수 있는 장비입니다.



